[PR]
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
コマンドサーボ(シリアルサーボ)を使う
2013.01.19 Saturday 03:55 | ロボット/電子工作
電卓ロボットは3つのサーボで動作しています。
ちょっとお高いけどコマンドサーボを使っています。
現在の角度が読めたりするので、目標角度までちゃんと移動したかとかがわかっちゃうわけですね。
サーボとのデータのやり取りはシリアル通信で行うのですが、
ちょいと面倒なことに半二重通信なんです。
サーボ側は通信線一本なんだけど、マイコン側は送信と受信がそれぞれあるので2本っていう。
というわけでこんな感じでつなぎました。
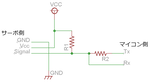
web上で検索すると3ステートバッファのICをかましてる例が多いのですがマイコンさんに直接つなぎます。
マイコンから送信するときは普通に。
ただし受信割り込みとか使ってるなら送信中は割り込みを切っておく。
受信時にはマイコンの送信ピンを入力に切り替えることでハイインピーダンスにするようにしました。
抵抗値が悪かったのか出力のままだとうまく受信できなかったので。
無駄な電流も使わないのでこの方がいいでしょう。
また、マイコンから送信している時にも受信ピンからデータが流れ込むので、受信バッファがオーバーフローします。
この辺はマイコンによると思うのですが、SH7125だとオーバーフローフラグをクリアしないと以後受信できないので、サーボからデータが返ってくる前にフラグをクリアしておく必要があります。
ちょっとお高いけどコマンドサーボを使っています。
現在の角度が読めたりするので、目標角度までちゃんと移動したかとかがわかっちゃうわけですね。
サーボとのデータのやり取りはシリアル通信で行うのですが、
ちょいと面倒なことに半二重通信なんです。
サーボ側は通信線一本なんだけど、マイコン側は送信と受信がそれぞれあるので2本っていう。
というわけでこんな感じでつなぎました。
web上で検索すると3ステートバッファのICをかましてる例が多いのですがマイコンさんに直接つなぎます。
マイコンから送信するときは普通に。
ただし受信割り込みとか使ってるなら送信中は割り込みを切っておく。
受信時にはマイコンの送信ピンを入力に切り替えることでハイインピーダンスにするようにしました。
抵抗値が悪かったのか出力のままだとうまく受信できなかったので。
無駄な電流も使わないのでこの方がいいでしょう。
また、マイコンから送信している時にも受信ピンからデータが流れ込むので、受信バッファがオーバーフローします。
この辺はマイコンによると思うのですが、SH7125だとオーバーフローフラグをクリアしないと以後受信できないので、サーボからデータが返ってくる前にフラグをクリアしておく必要があります。

PR
pickit2でPIC16F1827に書き込む
2012.12.17 Monday 00:32 | ロボット/電子工作
pickit2素のままだとPIC16F1827を認識しないようです。
http://www.microchip.com/stellent/idcplg?IdcService=SS_GET_PAGE&nodeId=1406&dDocName=en023805
ここのDevice File xxxx ってのをダウンロードして、
pickit2のインストールフォルダにあるPK2DeviceFile.datに上書きすればおっけー。
最初認識してくれないもんだから、プリント基板ミスったかと思った(´・ω・`)
http://www.microchip.com/stellent/idcplg?IdcService=SS_GET_PAGE&nodeId=1406&dDocName=en023805
ここのDevice File xxxx ってのをダウンロードして、
pickit2のインストールフォルダにあるPK2DeviceFile.datに上書きすればおっけー。
最初認識してくれないもんだから、プリント基板ミスったかと思った(´・ω・`)
手動型自動電卓ロボット「でんたくん」
2012.11.13 Tuesday 23:25 | ロボット/電子工作
そろばんロボットに対抗して作った電卓ロボット「でんたくん」
<ニコニコ動画>
<youtube>
8月中旬からなんとなーく構想考えて、
9月末から設計と制作をして、
10月頭の工大祭でとりあえず動く版を展示して、
それから一月くらいかけて高速化したりUSBマイコンつかってテンキーに対応させたりして、
今日やっと動画アップロード。
12/1, 2のMakerFaireTokyoでも展示予定。
ちなみにマイクロマウスの全日本大会は大人の事情により出られなくなりました。
いや、まぁ毎年高専ロボコンと被ってるのがあれなんだよね。
<ニコニコ動画>
<youtube>
8月中旬からなんとなーく構想考えて、
9月末から設計と制作をして、
10月頭の工大祭でとりあえず動く版を展示して、
それから一月くらいかけて高速化したりUSBマイコンつかってテンキーに対応させたりして、
今日やっと動画アップロード。
12/1, 2のMakerFaireTokyoでも展示予定。
ちなみにマイクロマウスの全日本大会は大人の事情により出られなくなりました。
いや、まぁ毎年高専ロボコンと被ってるのがあれなんだよね。
探索走行テスト
2012.09.02 Sunday 02:10 | ロボット/電子工作
マウスの動画(・∀・)
2012.08.30 Thursday 23:34 | ロボット/電子工作